Normal Distribution for \(\mathbf{Y}\) with constant variance or fixed covariance
linearity of \(\boldsymbol{\mu}\) in \(\mathbf{X}\)
Computational Advantages of Normal Models
Robustify with heavy tailed error distributions
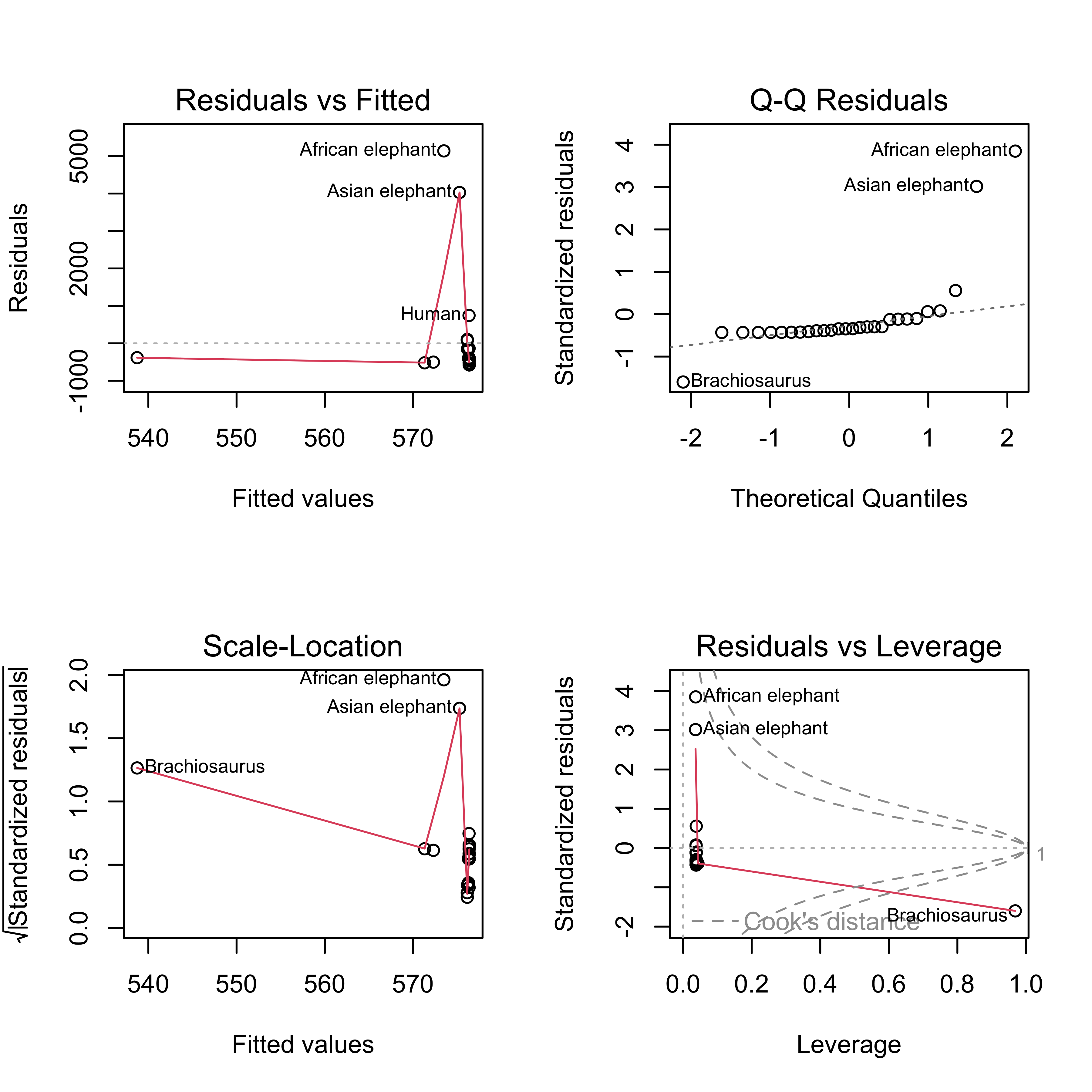
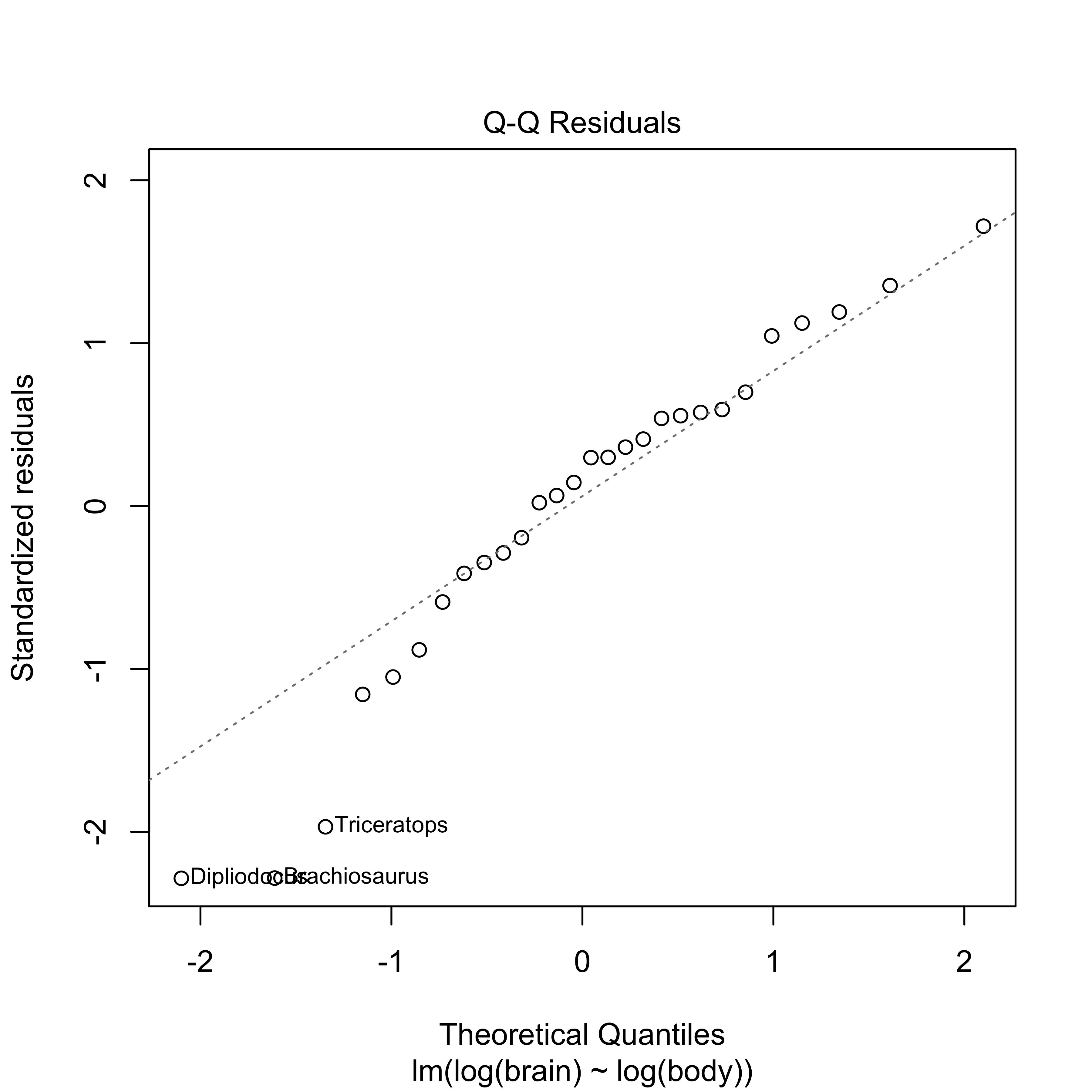
Checking via QQ-Plots
QQ-Plots are a graphical tool to assess normality
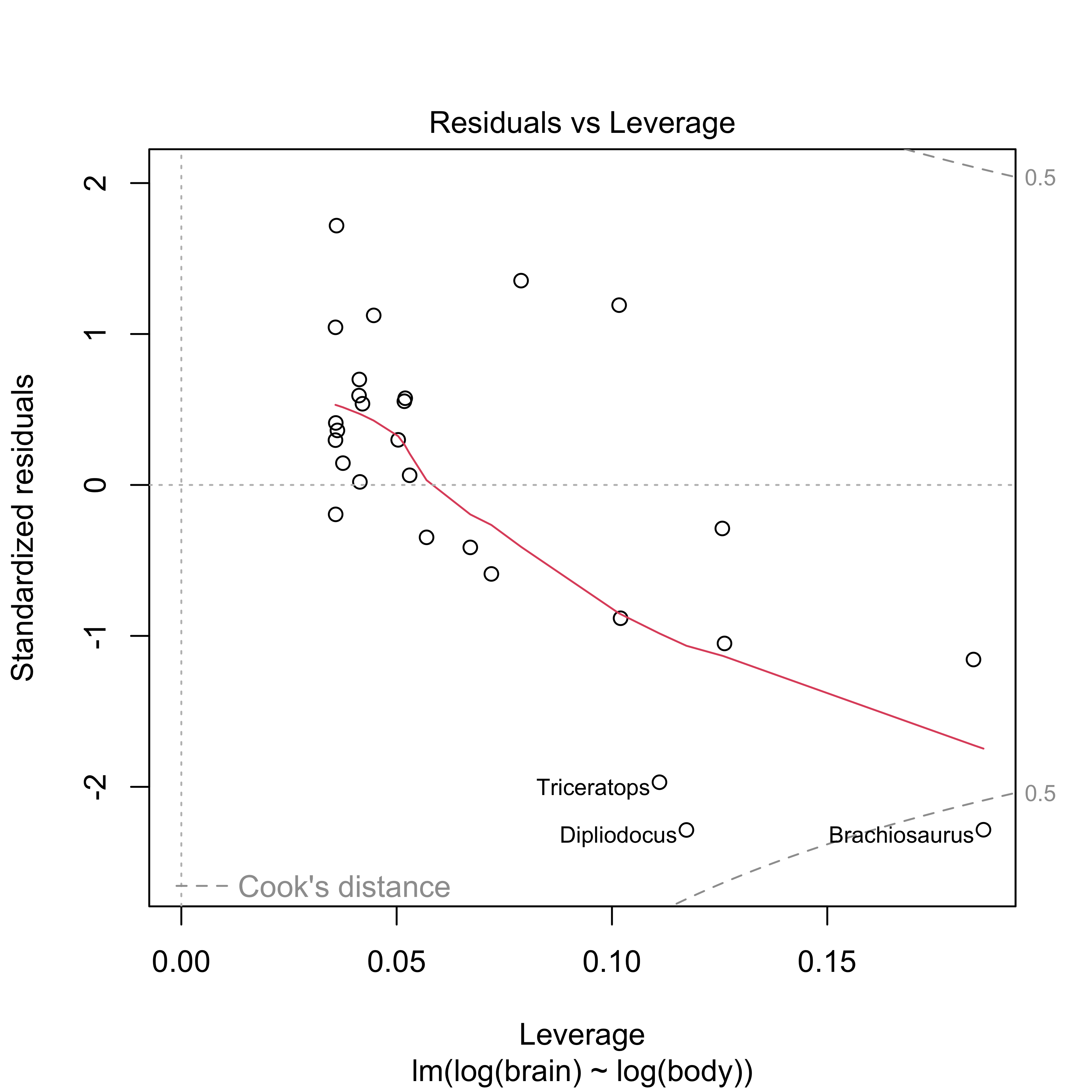
Order residuals \(e_i\): \(e_{(1)} \le e_{(2)} \ldots \le e_{(n)}\) sample order statistics or sample quantiles (standardized - divide by \(\sqrt{1 - h_{ii}}\)
Let \(z_{(1)} \le z_{(2)} \ldots z_{(n)}\) denote the expected order statistics of a sample of size \(n\) from a standard normal distribution ``theoretical quantiles’’
If the \(e_i\) are normal then \(\textsf{E}[e_{(i)}/\sqrt{1 - h_{ii}}] = \sigma z_{(i)}\)
Expect that points in a scatter plot of \(e_{(i)}/\sqrt{1 - h_{ii}}\) and \(z_{(i)}\) should be on a straight line.
Judgment call - use simulations to gain experience!
Lyapunov CLT (independent but not identically distributed) implies that residuals will be approximately normal (even for modest \(n\)), if the errors are not normal
Supernormality of residuals
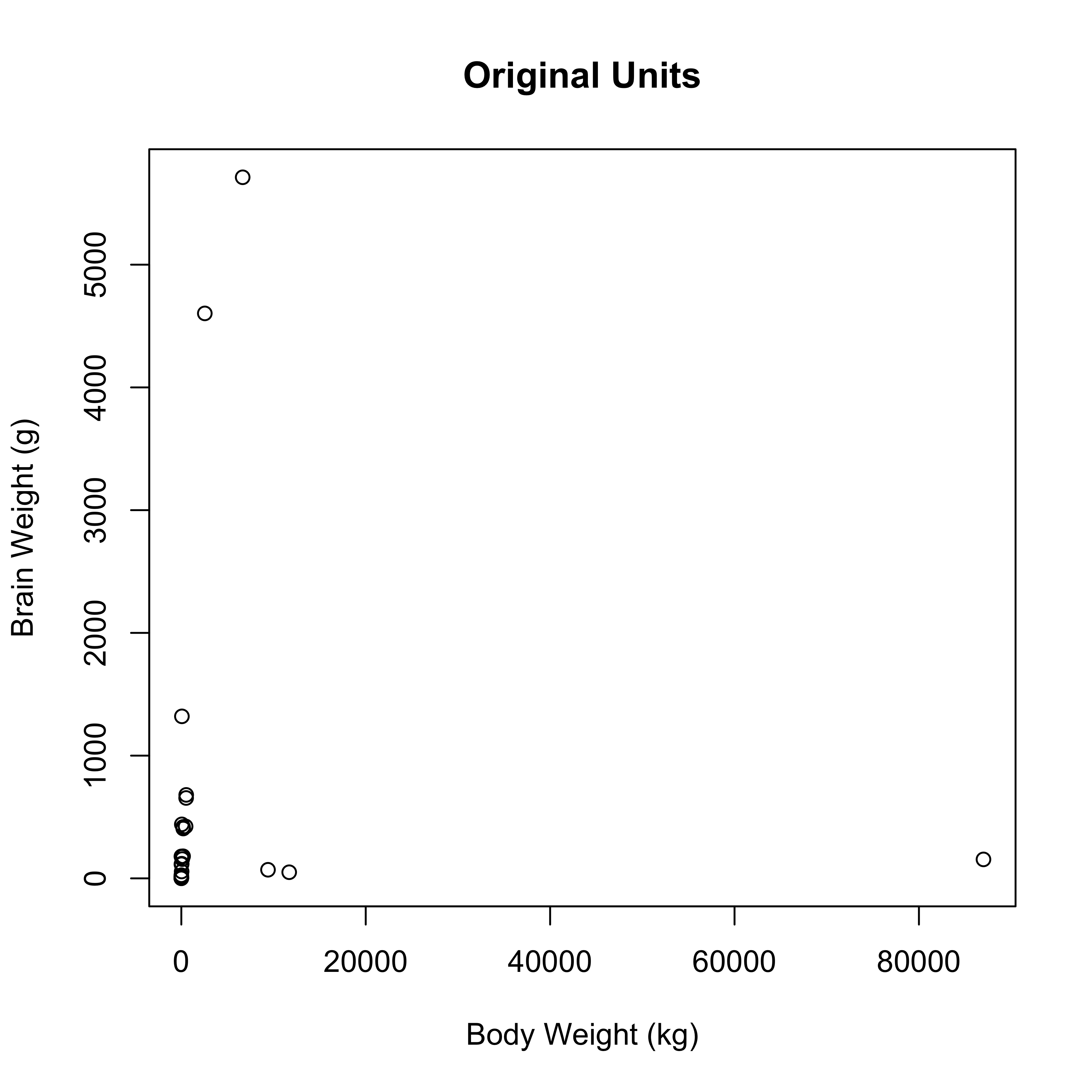
clearly not the case here!
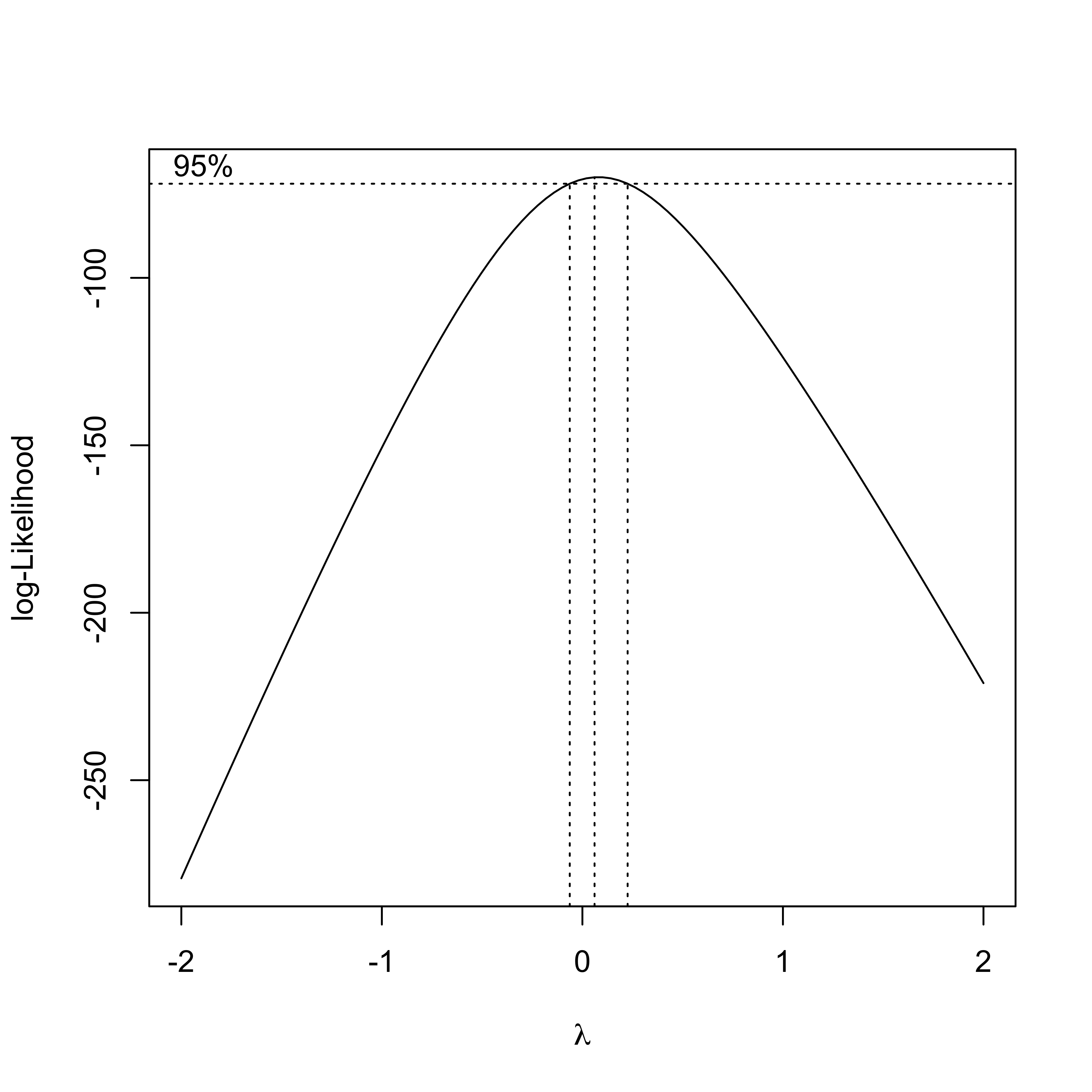
Box-Cox Transformation
Box and Cox (1964) suggested a family of power transformations for \(Y > 0\) \[
U(\mathbf{Y}, \lambda) = Y^{(\lambda)} = \left\{
\begin{array}{ll}
\frac{(Y^\lambda -1)}{\lambda} & \lambda \neq 0 \\
\log(Y) & \lambda = 0
\end{array} \right.
\]
Estimate \(\lambda\) by maximum Likelihood \[{\cal{L}}(\lambda, \boldsymbol{\beta}, \sigma^2) \propto \prod f(y_i \mid \lambda, \boldsymbol{\beta},
\sigma^2)\]
Jacobian term is \(\prod_i y_i^{\lambda - 1}\) for all \(\lambda\)
Profile Likelihood based on substituting MLE \(\boldsymbol{\beta}\) and \(\sigma^2\) for each value of \(\lambda\) is \[\log({\cal{L}}(\lambda) \propto (\lambda -1)
\sum_i \log(Y_i) - \frac{n}{2} \log(\textsf{SSE}(\lambda))\]
Profile Likelihood
Profile Likelihood is a function of \(\lambda\) obtained by substituting the MLE of \(\boldsymbol{\beta}\) and \(\sigma^2\) for each value of \(\lambda\)
Delta Method implies that \[g(Y) \stackrel{\cdot}{\sim}\textsf{N}( g(\mu), g'(\mu)^2 h(\mu))\]
Find function \(g\) such that \(g'(\mu)^2 h(\mu)\) is constant \[g(Y) \sim N(g(\mu), c)\]
Poisson Counts (need \(Y > 3\)), \(g\) is the square root transformation
Binomial: \(\arcsin(\sqrt{Y})\)
Note: transformation for normality may not be the same as the variance stabilizing transformation; boxcox assumes mean function is correct
Generalized Linear Models are preferable to transforming data, but may still be useful for starting values for MCMC
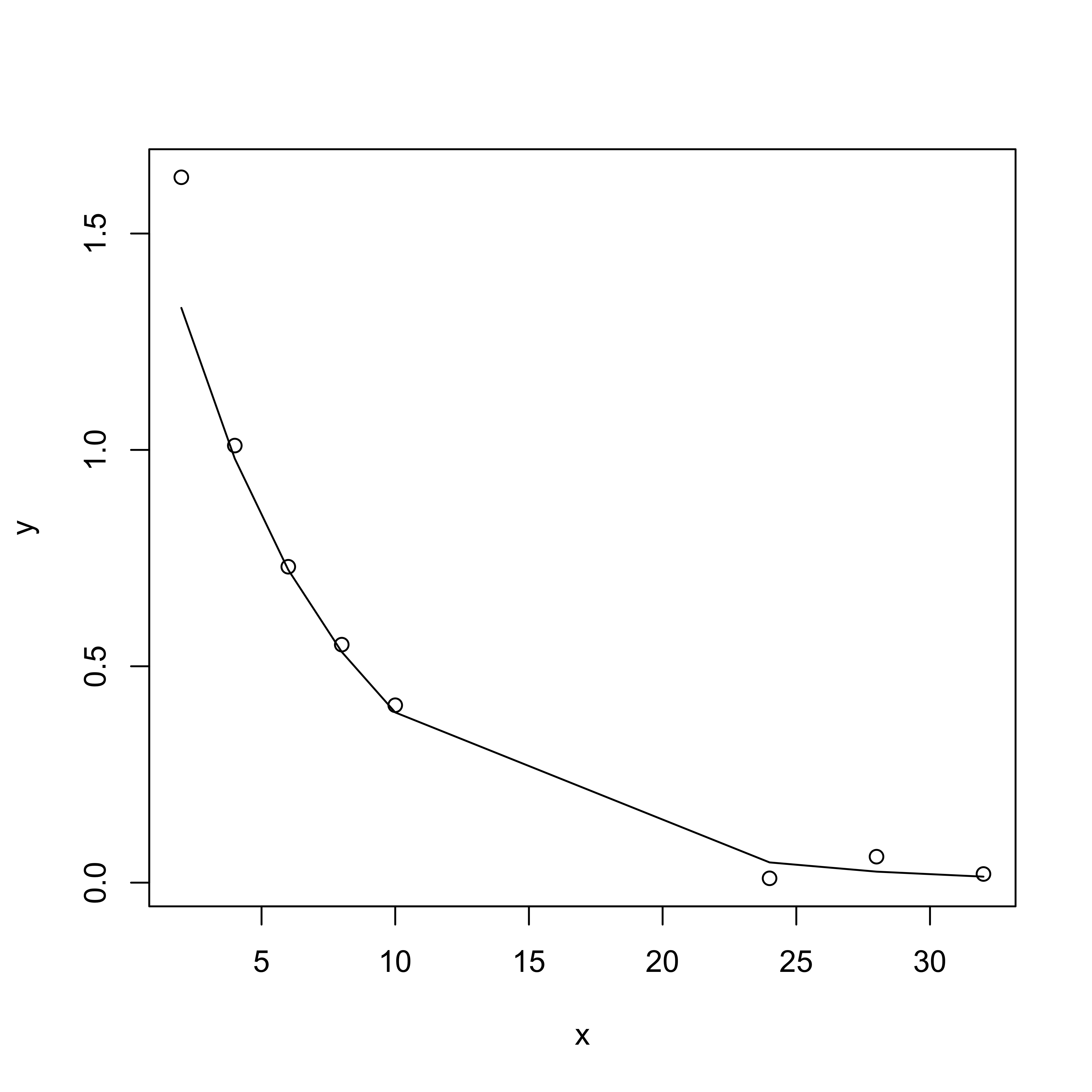
Nonlinear Regression
Drug concentration of caldralazine at time \(X_i\) in a cardiac failure patient given a single 30mg dose \((D = 30)\) given by \[
\mu(\boldsymbol{\beta}) = \left[\frac{D}{V} \exp(-\kappa_e x_i) \right]
\] with \(\boldsymbol{\beta}= (V, \kappa_e)\)\(V = volume\) and \(\kappa_e\) is the elimination rate
If \(Y_i = \left[\frac{D}{V} \exp(-\kappa_e x_i) \right] \times \epsilon_i\) with \(\log(\epsilon_i) \mathrel{\mathop{\sim}\limits^{\rm iid}}
N(0, \sigma^2)\) then the model is intrinisically linear (can transform to linear model)
\[\begin{eqnarray*}
\log(\mu(\boldsymbol{\beta})) & = & \log\left[\frac{D}{V} \exp(-\kappa_e x_i) \right] = \log[D] - \log(V) -\kappa_e x_i \\
log(Y_i) - \log[30] & = &\beta_0 + \beta_1 x_i + \epsilon_i
\end{eqnarray*}\] where \(\epsilon_i\) has a log normal distribution
If \(\mathbf{Y}= \left[\frac{D}{V} \exp(-\kappa_e x_i) \right] + \epsilon_i\) model is intrinisically nonlinear and cannot transform to a linear model.
need to use nonlinear least squares to estimate \(\boldsymbol{\beta}\) and \(\sigma^2\)
or MCMC to estimate the posterior distribution of \(\boldsymbol{\beta}\) and \(\sigma^2\)
Formula: log(y) ~ log((30/V) * exp(-k * x))
Parameters:
Estimate Std. Error t value Pr(>|t|)
V.(Intercept) 16.66331 7.11923 2.341 0.057796
k.x 0.15211 0.02368 6.423 0.000673
Residual standard error: 0.7411 on 6 degrees of freedom
Number of iterations to convergence: 0
Achieved convergence tolerance: 4.056e-09
Intrinsically Nonlinear Model
Formula: y ~ (30/V) * exp(-k * x)
Parameters:
Estimate Std. Error t value Pr(>|t|)
V 13.06506 0.60899 21.45 6.69e-07
k 0.18572 0.01124 16.52 3.14e-06
Residual standard error: 0.05126 on 6 degrees of freedom
Number of iterations to convergence: 4
Achieved convergence tolerance: 7.698e-06
Use properties of MLEs: asymptotically \(\hat{\boldsymbol{\beta}} \sim N\left(\boldsymbol{\beta},
I(\hat{\boldsymbol{\beta}})^{-1}\right)\)
Asymptotic Distributions
Bayes obtain the posterior directly for parameters and functions of parameters!
Priors?
Constraints on Distributions?
Bayes Factor for testing normal vs log-normal models?
Summary
Optimal transformation for normality (MLE) depends on choice of mean function
May not be the same as the variance stabilizing transformation
Nonlinear Models as suggested by Theory or Generalized Linear Models are alternatives
``normal’’ estimates may be useful approximations for large \(p\) or for starting values for more complex models (where convergence may be sensitive to starting values)